5. Quick Start: PX4#
Note
SkyHub does not support True Terrain following with PX4. SkyHub works only as data logger for payload sensor using position data from PX4 autopilot.
Connection with SkyHub during the flight can be established only if UgCS desktop is used as ground control software.
5.1. Hardware requirements#
SkyHub v3 device.
Drone running PX4 flight controller with firmware version 1.7+
Mounting parts to install SkyHub.
SkyHub3 cable for Pixhawk autopilot or cable provided by drone manufacturer to connect SkyHub with autopilot.
Power output (according to SkyHub required input power).
5.2. Software requirements for the Windows PC#
UgCS v5.13.0 or higher (referred to below as UgCS)
UgCS Custom Payload Monitor v4.3.0 or higher (referred to below as UgCS-CPM)
QGroundControl for the PX4 configuration.
WinSCP (optional) to access SkyHub file system for advanced configuration.
5.2.1. UgCS desktop download and setup process#
Download the installation package: https://www.sphengineering.com/flight-planning/ugcs-downloads
Run the setup file.
Read and acknowledge the license agreement.
In the component selection tab, select ArduPilot to install necessary autopilot compatibility.
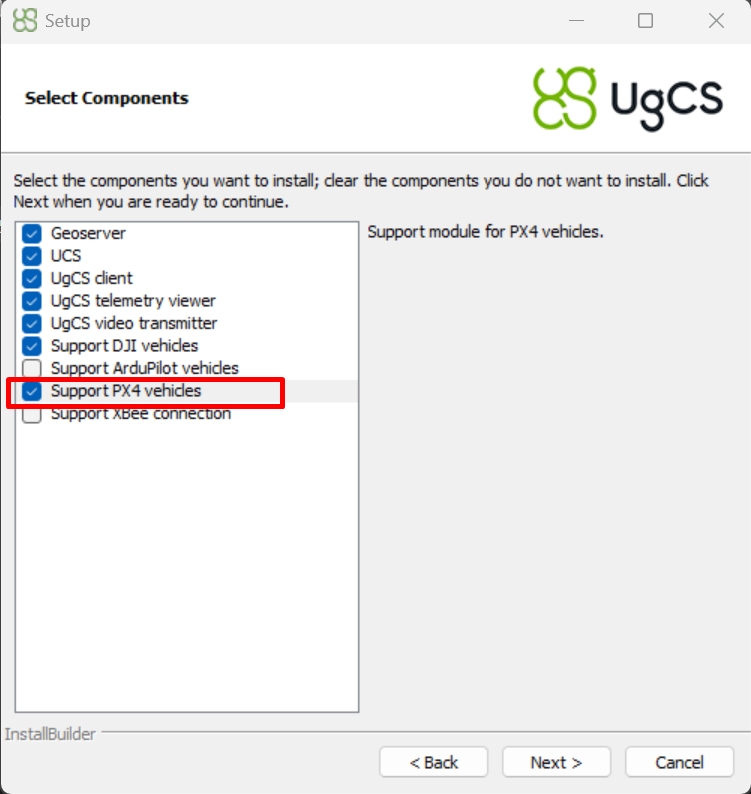
PX4 VSM in UgCS setup#
Installation complete.
5.2.2. UgCS Custom Payload Monitor download and setup process#
Download the latest available CPM version here: https://www.sphengineering.com/integrated-systems/downloads
Run the setup file.
Select the SkyHub license file for the SkyHub you will be using.

Read and acknowledge the license agreement.
Installation complete.
Note
If you do not have a license file or need a new one, please reach out to us at support@ugcs.com and provide your SkyHub serial number.
5.2.3. SkyHub installation on the drone#
5.3. Physical setup#
Warning
Power off the system when connecting cables. To avoid short-circuiting or causing potentially harmful power fluctuations, it is recommended to power off the entire system before performing any cable plug-in or unplugging. Some of the payload sensors used are extremely sensitive to power changes and may be damaged.
Mount SkyHub on the drone in a safe, fixed position.
Connect SkyHub Connector #3 (red) to the flight controller using the SkyHub 3 cable for Pixhawk autopilot.
Connect SkyHub to a power source.
5.4. Autopilot configuration#
Make sure UgCS version 5.13 or higher is used (download links can be found in Prerequisites section) and VSM for PX4 vehicles is installed.
Establish Auxiliary connection between UgCS-CPM and SkyHub. See Preparation guide for instructions.
When Auxiliary link is established, you should select it from the Link menu in UgCS-CPM.
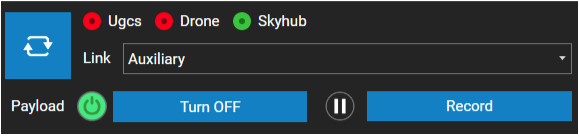
Auxiliary Link settings in UgCS-CPM#
Note
The following functionalities are available when SkyHub is connected via the Auxiliary link:
Widget configuration in UgCS-CPM.
Data from payload in widgets.
Data download from SkyHub.
Firmware upgrade.
SkyHub configuration.
Enable MAVLink autopilot on SkyHub.
In UgCS-CPM, press the “Settings” button, choose “SkyHub Autopilots” from the menu and enable “MAVLink”. Press Save and choose to reload the system to apply changes.
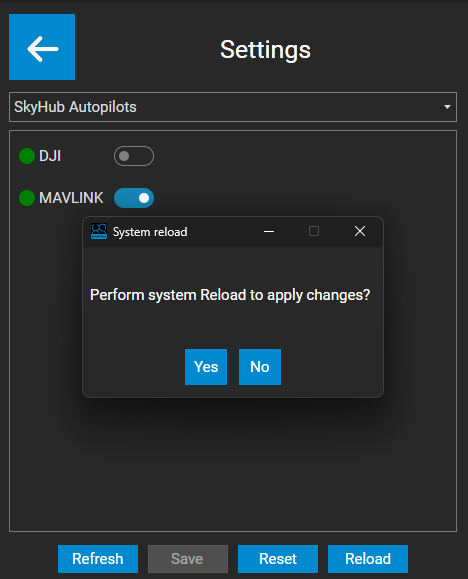
Enabling MAVlink in UgCS-CPM#
Restart SkyHub.
Make sure that the UgCS PX4 VSM parameter
vehicle.px4.custom_payload.onboard.component_idis equal to theComponent IDvalue in the MAVLink settings within the UgCS-CPM.Make sure that the V2 Extension parameter is enabled.
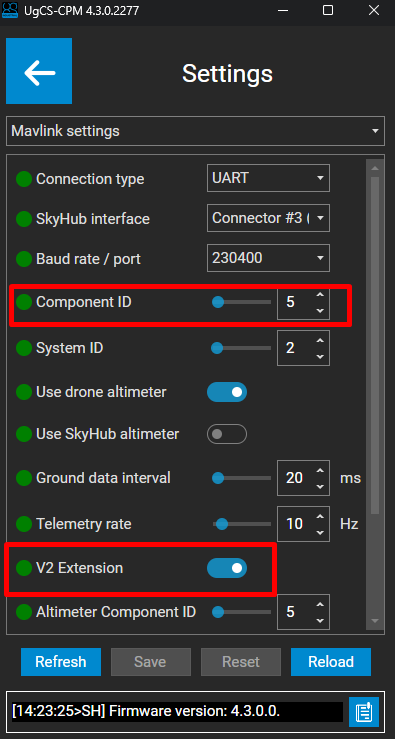
MAVLINK settings#
If SkyHub is connected to telemetry port 2, open the QGroundControl application, then go to Parameters -> MAVLink and set the parameter
MAV_1_CONFIGtoTELEM2.
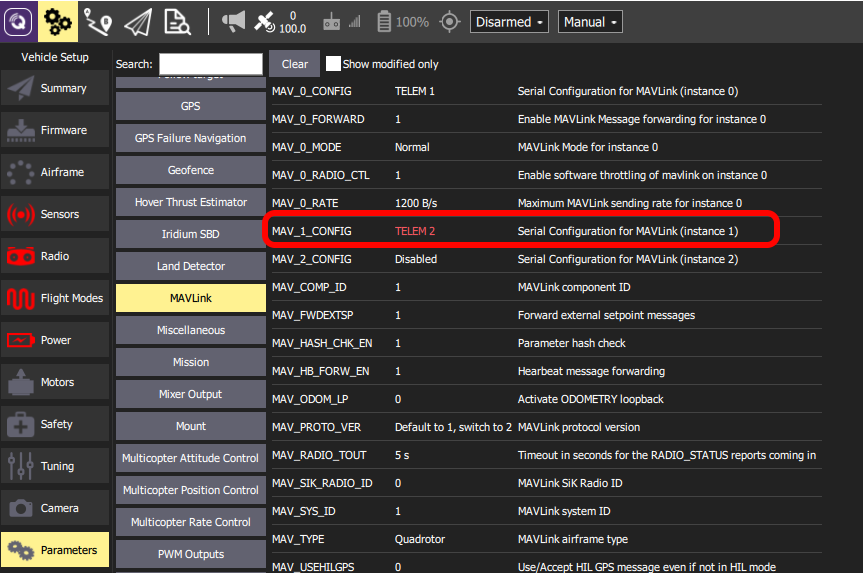
SkyHub PX4 TELEM2 port configuration#
Restart the autopilot.
After restart, data forwarding for
TELEM2autopilot telemetry ports should be enabled. Set the parameterMAV_1_FORWARDto1.

SkyHub PX4 TELEM2 port data forwarding configuration#
Change the baud rate for the TELEM2 Serial Port (recommended 230400). Speed should be the same as configured on the SkyHub side in the MAVLink settings within the UgCS-CPM.
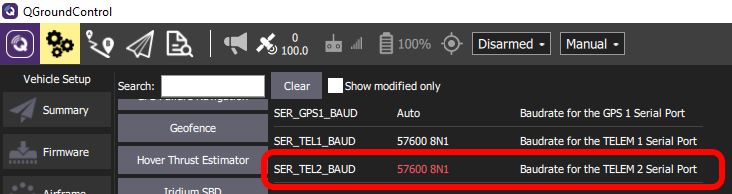
SkyHub PX4 TELEM2 port baudrate configuration#
Note
SkyHub subscribes to the following MAVLink messages with telemetry rate defined by the Telemetry rate parameter in the MAVLink settings within the UgCS-CPM:
GPS2_RAW; GPS_RAW_INT; GLOBAL_POSITION_INT; ATTITUDE; SYSTEM_TIME; HEARTBEAT; DISTANCE_SENSOR
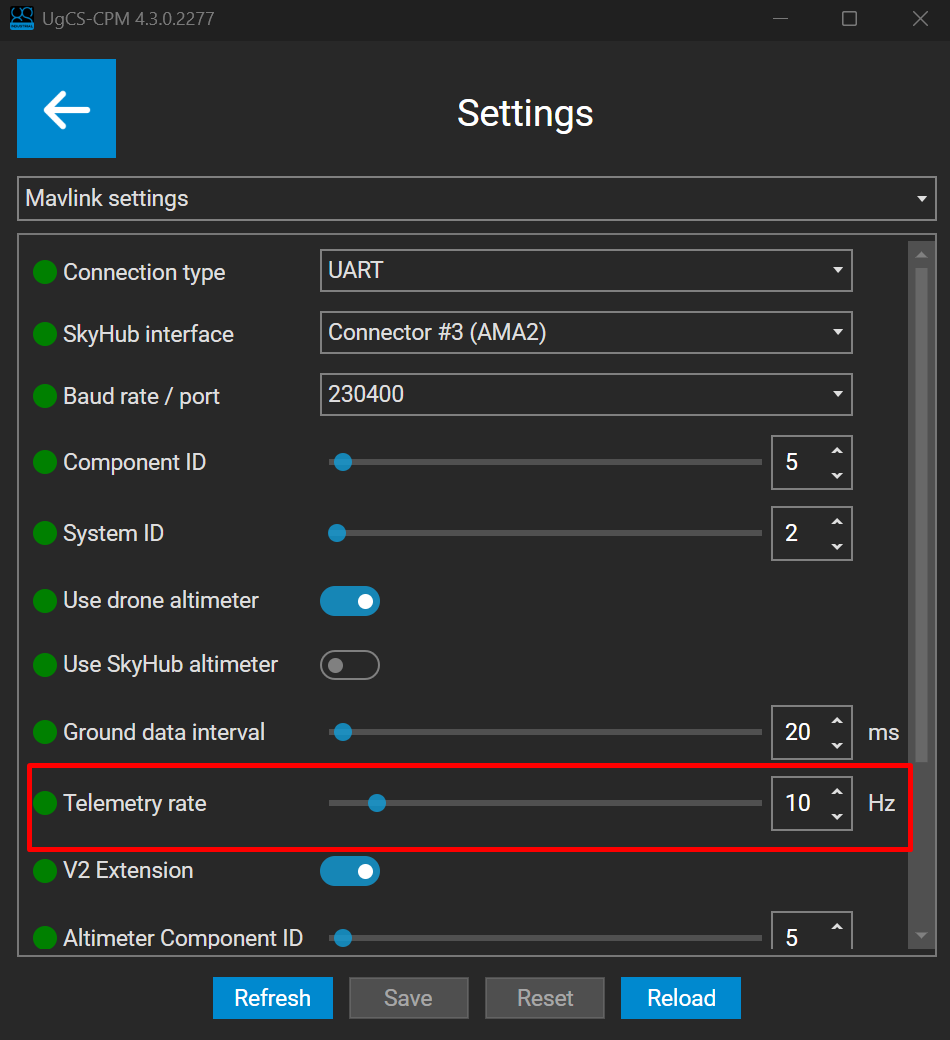
Mavlink telemetry rate#